Preliminary Study on Contact Planning Work
Awarded Best Extended Abstract at TAROS2023 in Cambridge, benchmarking my contact planning algorithm against state of the art.
I am a postgraduate researcher at the University of Manchester, based in the Centre for Robotics and AI (formerly based in the Robotics for Extreme
Environments Group). My research focusses on generalised planning methods for legged robots in challenging terrain geometries, with applications in
disaster response scenarios, subterranean environments and cluttered industrial areas. I also have experience and interest in robotics for the
nuclear sector, and with community building and organising.
I recently changed my name so some of my activities may be listed under my previous name (Daniel S. Johnson).
Awarded Best Extended Abstract at TAROS2023 in Cambridge, benchmarking my contact planning algorithm against state of the art.

Lead an interdiciplinary team of 30 engineers and musicians to build a team of robots that play musical instruments.

Undergraduate final project. Performing a comprehensive, data driven comparison of several robot navigation algorithms.
Chair and other senior roles in the UoM Robotics Society, managing over 250 members across 6 different projects.
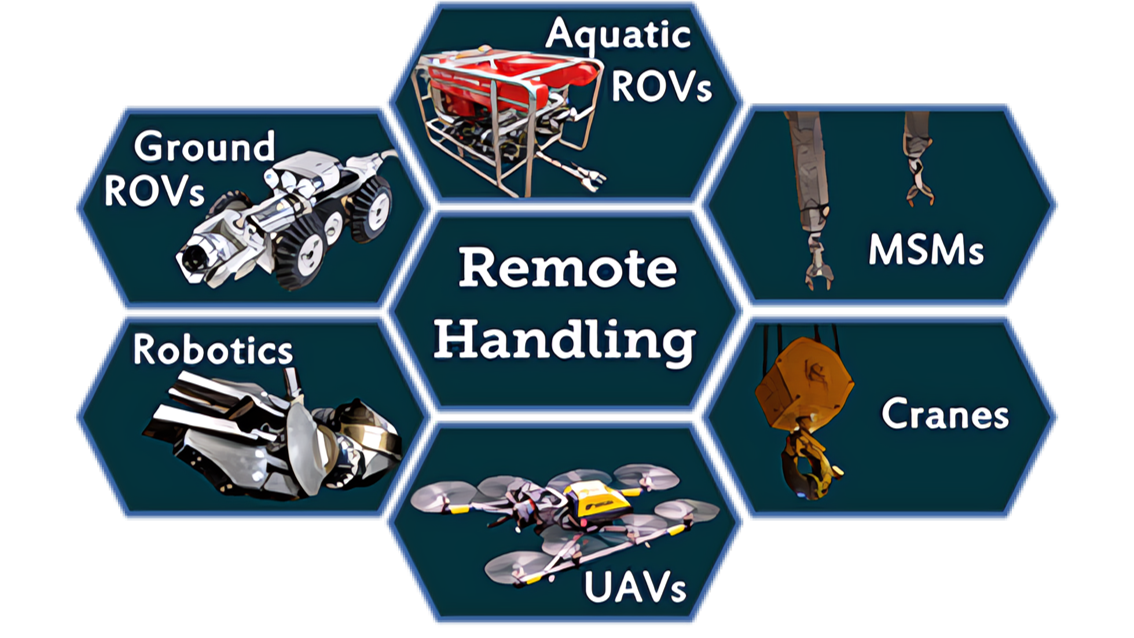
Worked at Sellafield as part of the Remote Handling Equipment Programme, responsible for high TRL robotics, ROVs and UAVs.
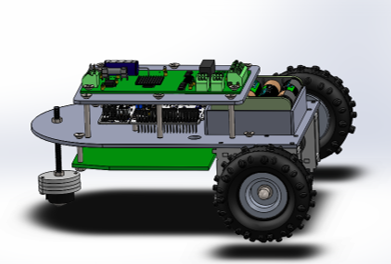

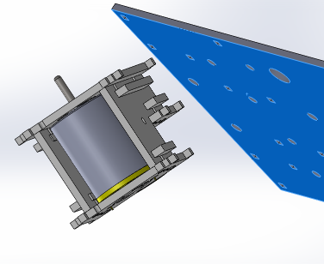
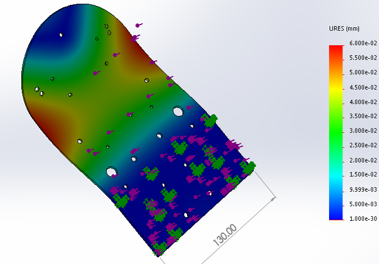
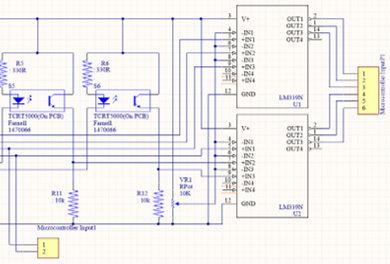
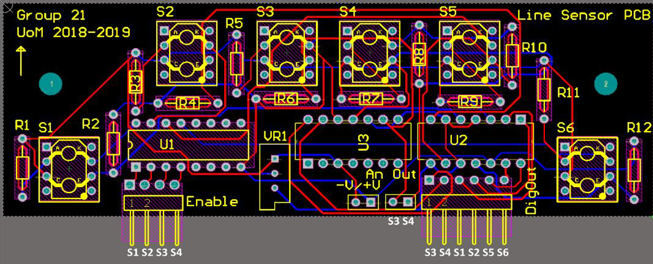
Developed a differentially steered robot to follow a line through an obstacle course as part of my undergraduate studies.
Developed kinematic controllers for a 6 DOF robot arm as part of a personal project undertaken with the Robotics Society.
I'd be very happy to discuss my work, or anything else, with anyone that's interested. Click below for contact information.